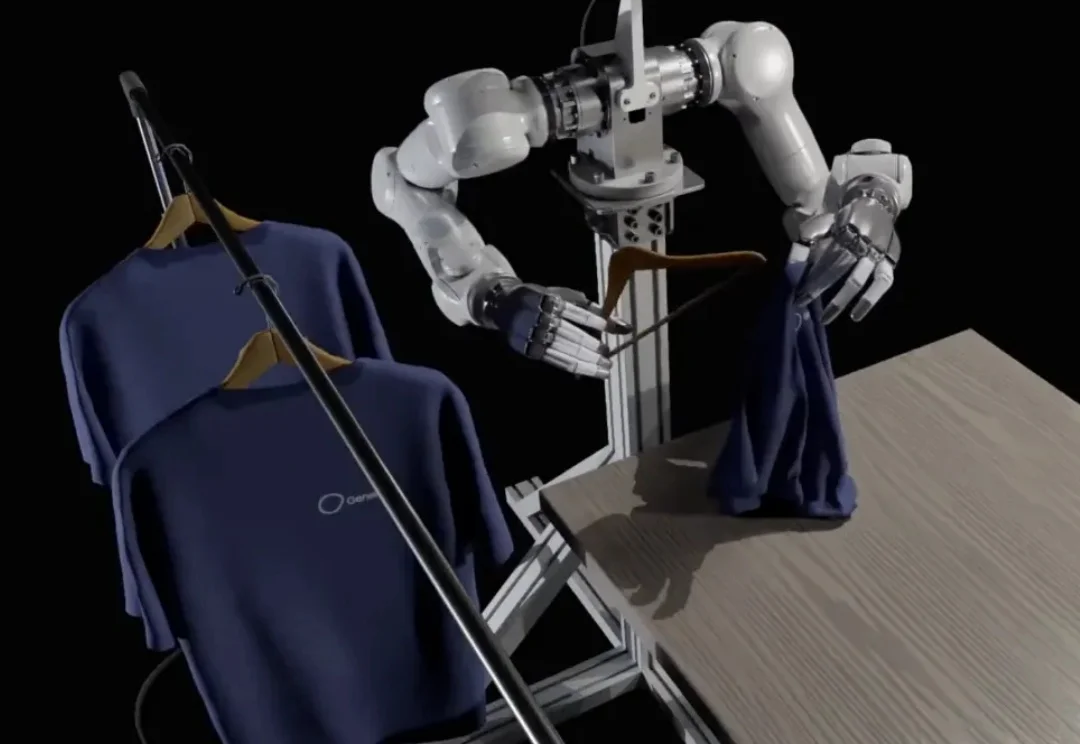
还记得那个让机器人学会番茄炒蛋的Genesis AI吗?他们今天又放了个大招。5月28日,Genesis AI正式发布Genesis World 1.0,并一口气开源了三套核心项目:Genesis World物理仿真平台、Quadrants跨平台GPU编译器,以及Nyx写实渲染器。这可不是简单的升级,而是一套为机器人和Physical AI准备的全栈仿真基础设施,底层编译器、渲染器和物理引擎全部自研。CEO周衔此前在极客公园的报道中曾提到,围绕仿真平台自动化、规模化生成任务,公司有了更进一步的思考,现在答案来了。对机器人基础模型来说,真实世界一直是最慢、最贵、也最难规模化的评测环境。一个模型checkpoint、一套数据配方、一次控制策略改动,最终都要回到真实硬件上验证。但真实机器人只能以1倍速运行,还要受硬件数量、场地、人工、磨损、校准误差和安全风险的限制。Genesis World 1.0首先瞄准的就是这个瓶颈。根据官方数据,一次覆盖数百个任务、每个任务重复数百次的模型评测,在真实世界需要一台机器人和一名操作员连续运行200多小时;而在仿真中,数万次episode可以在不到0.5小时内完成。更关键的是,仿真评测结果与真实硬件rollout的相关性达到89%。虽然这些数据尚未经过独立验证,但指向了一个清晰的方向:仿真可以成为帮助机器人scaling的有效方式。Genesis World 1.0最令人印象深刻的是对物理细节的模拟。它不仅能呈现视觉真实感——光照、镜头畸变、模糊、反射、材质差异这些影响机器人判断的因素,还能处理过去很难模拟的柔性物体形变和复杂碰撞。演示中,一个完全由接触物理驱动的yoyo系统展示了绳子、旋转、缠绕、张力变化和持续接触的复杂交互。颠勺demo里,锅中多种物体的形态、接触和运动方式各不相同,但系统处理得相当出色。更值得关注的是灵巧操作的仿真:机器人用五指灵巧手撑开垃圾袋、套进垃圾桶,在这个过程中袋口塌陷、薄膜折叠、手指与袋子之间不断发生滑动和拉扯。折纸demo则展示了elastoplastic thin shell manipulation,让纸张发生折叠、弯曲和保形,难度远超刚体抓取。Genesis World 1.0的野心不止于此。在Unitree机器人demo中,画面右侧甚至显示了关节温度,仿真不仅关心机器人走起来没有,还把IMU、关节温度这类更接近真实硬件状态的信号纳入其中。另一组demo展示了lidar和触觉传感器模拟:机器人抱起纸箱时,画面同时给出点云和手掌触觉读数。这些细节让Genesis World 1.0的目标更加清晰:它不只是想做能看视频的虚拟世界,而是要成为足够接近真实世界、能够反复测量机器人模型的试验场。对于AI从业者来说,这意味着未来可以更高效地迭代模型、验证策略,而不再被真实硬件的速度、成本和风险所束缚。随着这套全栈仿真基础设施的开源,机器人领域的研发节奏很可能迎来一次加速。
Genesis AI开源机器人训练场,虚拟训练效率提升400倍
AITNT
2026-05-29
25
11