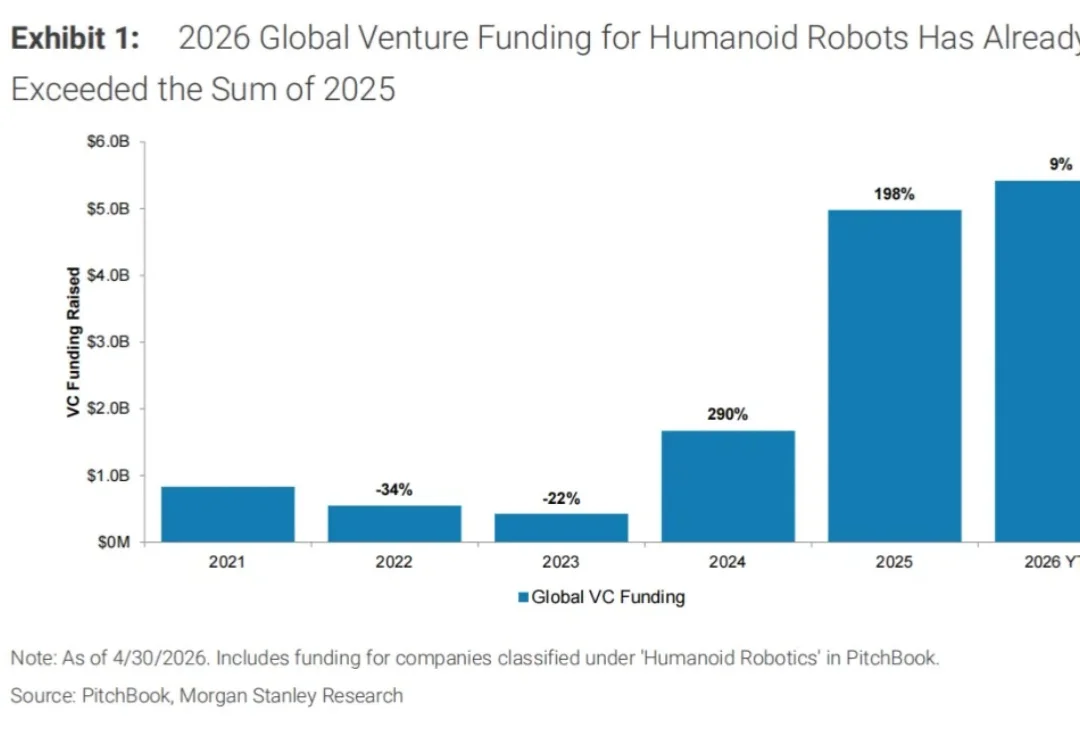
在具身智能行业,世界模型正成为热词,但灵初智能给出了不同的答案。联合创始人陈源培明确表示,世界模型只是工具,核心是从Day One就专注的人类数据。灵初认为,在10万小时量级上,人类数据已能大幅替代真机数据,为训练通用机器人能力打开新路径。这一判断基于其在CoRL 2024发表的研究,以及大规模数据实践,正在重新定义行业的数据策略。灵初面临的核心挑战是数据迁移效率。传统遥操作采集成本高、规模受限,而纯视觉数据存在人机形态差异。灵初的解决方案是双轨采集:一是高精度外骨骼手套,捕捉完整手部动作且不影响日常操作,如让收银员戴着手套正常工作;二是纯视觉数据,通过头戴和腕部摄像头记录,成本低、易规模化。这种human-centric路线接受更高的迁移难度,但换取了数据规模上限的突破,与robot-centric方案形成鲜明对比。技术核心在于迁移管线。灵初构建了W0和R2双模块系统:W0是动作条件世界模型,模拟环境反馈;R2是策略网络。训练时,R2在W0构建的仿真器中通过强化学习迭代,将人类动力学迁移到机器人上,生成新数据反哺自身。部署时W0退场,仅运行R2。这一设计解决了人类数据噪声大、不规范的问题,同时避免真机试错的高成本。陈源培强调,世界模型只是工具,目标是构建从人类数据到机器人策略的完整转化管线。行业资本正在加速涌入。Morgan Stanley Research统计显示,截至2026年4月底,全球人形机器人VC融资已超2025年全年。灵初的实践表明,数据规模与迁移效率的平衡点正在向人类数据倾斜。对于从业者而言,这意味着需要重新思考数据采集策略:与其执着于机器人专属数据,不如挖掘真实劳动场景中的人类操作行为。未来,随着数据管线成熟,具身智能的落地能力可能迎来质变,而灵初的human-centric路线或成为行业标配。